木星の4つの衛星の1つであるエウロパの表面は、恐るべき敵となります。 まず最初に、それは厚い氷の外皮に包まれ、木星の大規模な引力によって大きな割れ目に引き裂かれました。 次に、表面の重力が非常に低く、滑りやすい氷の峡谷があります。 しかし、そのすべての氷の下で、エウロパには生命を支える液体の海があると考えられており、次の詳細な太陽系探査の主要なターゲットになっています。
関連性のあるコンテンツ
- 人間が他の惑星への植民地化を始めたとき、誰が責任を負うべきか?
- エウロパで噴火する氷の間欠泉の証拠が積み重なる
- 火星を自分から救うことはできますか?
では、NASAはこの危険な課題をどのように克服するのでしょうか? 1996年にMars 'Ares Vallesを最初に通過したときにロボット類に1つの大きな飛躍をもたらしたSojournerのような車輪付きのローバーを送信することは確かにできません。代わりに、NASAはこれらのかつての革命的な車輪を廃止し、次世代のロボットの数は、今後数十年で小惑星と太陽系の極寒の外の世界を探索します。
入力:LEMUR
現在、約75ポンドの重さで、この次世代のローバーは、ほぼ1トンでチェックインするMars 'Curiosityのサイズのほんの一部です。 そのサイズだけで、ロボットの能力の限界が広がりますが、それが展開された場合、それ以上のことをする必要があります。 パイントサイズのローバーは、極端な温度と磁気条件に耐えなければなりません。 表面をナビゲートします。 かつてないほど軽量でスマートな宇宙科学機器で意味のあるデータを収集するのに十分な時間をかけてください。
タスク次第ですか?
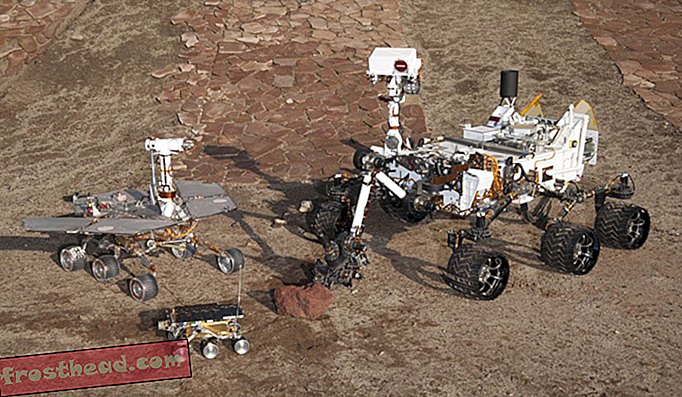 カリフォルニア州パサデナにあるジェット推進研究所のマーズヤード内で撮影された1997年から2012年までのNASAの3世代の火星探査機:ソジャーナー(前)、火星探査ローバープロジェクトの試験探査機(左)、および好奇心試験探査機(右)の予備機。 (NASA / JPL-Caltech)
カリフォルニア州パサデナにあるジェット推進研究所のマーズヤード内で撮影された1997年から2012年までのNASAの3世代の火星探査機:ソジャーナー(前)、火星探査ローバープロジェクトの試験探査機(左)、および好奇心試験探査機(右)の予備機。 (NASA / JPL-Caltech) 確かに、ロボットLEMUR(「手足エクスカーションメカニカルユーティリティロボット」の頭字語)は、ドリームワークスのマダガスカルで人気のある、目が大きくふわふわした尾のある種ほどキュートではありません。 むしろ、ロボットは本物の哺乳類の両手利き性からその名前を取得します。 当初は有人月のミッションの修理ロボットを目的としていましたが、ローバーは峡谷や洞窟の垂直面と反転面の微小重力探査用に再設計されました。
「[キツネザル]手と足の両方を可動性と操作に使用します」と、NASAのジェット推進研究所(JPL)の極限環境ロボットグループリーダーであるアーロンパーネスは説明します。 「ロボットには明確な腕や脚はありませんが、人間や人間よりもはるかに効率的に足を使って物事を行うことができるという点で、猿やキツネザルに似ています。」
火星で見られる環境よりもさらに奇妙な環境でロボットが動き回ることを保証するために、Parnessのグループは「キメラロボット」と呼ばれるものを作成しました。これは多くの異なる陸生動物の能力を利用するロボットです。 LEMURはその手足とパドルのような足で、クモやヒトデを連想させ、その付属物を使ってクリープし、薄い表面にしがみつきます。
ロボットの4つの手足には、交換可能な円形の「足」が取り付けられており、さまざまな機能を備えたアタッチメント用に交換できるスイスアーミーナイフスタイルで、さまざまな表面を横断できます。 ロッククライミングフィートは、マイクロスパインと呼ばれる一連の小さなかみそりのように鋭いスチールフックを備えており、1本の足でロボット全体の重量を支えるのに十分なほど、岩の粗い表面をしっかりとグリップします。 宇宙ステーションや衛星の外殻などの滑らかな表面の場合、LEMURはヤモリのような粘着性のある足で接着します。
最近、研究者たちは、LEMURの「手」の1つを南極大陸に持ち込んで、潜在的に重要な新しい付属品であるねじのようなアイスドリルをテストしました。 Parnessと彼のチームは、ハードウェアをテストする準備ができたら、「見つけることができる最も厳しい場所を探します」とParnessは言いました。 「適切な環境を整えることと適切なバランスをとる必要がありますが、チームをそこに置くのは非常に高価で不可能なほど遠くないことです。 南極はまさにその端にありました。」
そのために、彼らは、地球の最南端の活火山であるエレバス山によって形成された氷のトンネルをうろついて、はるか南の大陸でいくつかの夏を過ごした地理学者になり、火山学者になり、ロボット学者になったアーロン・カーティスに呼びかけました。 夏の平均気温は華氏-22度まで下がり、火山、それが作り出す氷層、そしてその溶岩湖は、脚のローバーがエウロパやエンケラドスのような氷の月で遭遇するかもしれない条件の公正な代理を表しています。
 アーロンカーティスはこの12月に南極大陸を訪れ、ヨーロッパのような氷の世界のために設計されたロボットと機器をテストしました。 (ニールピーターズ)
アーロンカーティスはこの12月に南極大陸を訪れ、ヨーロッパのような氷の世界のために設計されたロボットと機器をテストしました。 (ニールピーターズ) 過去7年間のうちの6年間、エレバス火山展望台の研究員として、カーティスは火山周辺の氷の地形図を作成しました。 彼の特別な関心は、火山の割れ目から逃げるガスによって氷の中に溶け込んだ洞窟やトンネルの中にありました。 トンネルが外部に接続されている場所を見つけることは、ガスが逃げることによって形成される高さ数メートルの高さのある「氷の煙突」を見つけるのと同じくらい簡単な場合がありました。 偶然にスノーモービルを地面の隠された穴に落として洞窟の入り口を見つけることを意味する他の時間。
カーティスは、4年かけて1つの洞窟を3Dでマッピングしてその変化を観察した後、何度も同じ課題に繰り返し直面していることに気付きました。 第一に、彼のチームは特定のエリアに到達することができませんでした。なぜなら、彼らは人間の探検には毒性が強すぎるからです。 第二に、彼らは人間の存在が、混入した微生物で希少な環境を不注意に汚染することを恐れていました。 これらの2つの懸念により、彼はロボットエクスプローラーの有用性を検討しました。
「氷上を移動できるロボットがあれば、微生物に敏感でガスが充満した洞窟を探索できました」とカーティスは言います。 彼自身のアイスボットのいじくりは、昨年10月にロボット工学者として参加したJPLで既に進行中の作業に適したものになりました。
Microspinesは、アタッチメントがスパインを岩の上に押し込んで購入できるように設計されているため、氷を握るのではなく、単に氷を砕く傾向があることが判明しました。 そこでカーティスは、小さなドリルを使って氷の表面に掘るアタッチメントを設計しました。
カーティス氏によると、元のデザインは氷で詰まっているため、人間の氷の愛好家が自分たちの生活に信頼しているもの、つまり既製の氷ねじに目を向けました。 それらは中空で、氷が掘削端の後ろに堆積するのではなく通過できるようにし、LEMURがゆっくりとクリープしながら氷のサンプルを生成および収集できるようにします。
次の氷の世界のテストは、ワシントン州のレーニア山頂の氷河で行われる可能性があります。完全なLEMURシャーシを使用し、足のアタッチメントだけではありません。 しかし、Parness氏は、サンプリング機能をテストする機能は、開発プロセス全体のもう1つの重要な目標を強調しているとも述べました。
「フィールドテストでは、将来の使用に向けてテクノロジーを実証するだけでなく、その場所で意味のある科学を行うという2つの目標を常に達成しようとしています」と彼は言います。 言い換えれば、LEMURテストは、最終的に他の体の低温火山を理解するのに役立つだけではありません。 「これは地球上でも私たちに利益をもたらします」とParness氏は言います。
 LEMURは、最近のテスト実行中に、JPLのAaron Parnessのラボでトレーニングを受けました。 (NASA / JPL-Caltech)
LEMURは、最近のテスト実行中に、JPLのAaron Parnessのラボでトレーニングを受けました。 (NASA / JPL-Caltech) ペネロペボストンは35年以上にわたり、メキシコのタバスコにある硫酸に浸したCueva de Villa Luzなどの極端な環境で微生物の生活とその指標を探し求めてきました。 ボストンは、地下の洞窟と陥没穴の老化と侵食プロセスを研究したニューメキシコ工科大学の洞窟とカルスト研究のディレクターとしての以前の役割で、彼のチームとLEMURが何を探すべきかを学ぶことができる場所にパーネスを導きました、そしてそれを探す方法。
NASAのAstrobiology Instituteを率いるボストンは次のように述べています。
彼女が付け加えた可能性のメニューは、微生物が岩盤や鉱物の堆積物を変換していることを示すテクスチャーなど、生物学的プロセスによって岩層の中または上に残されたパターンです。 地球上では、そのような証拠はニューメキシコのレチュギラ洞窟のような場所に存在します。そこでは硫黄、鉄、マンガンを食べるバクテリアが洞窟や壮大な石の形成を形成する役割を果たしたと考えられています。
微生物の生活によって残された手がかりは、通常それほど明白ではありません。 しかし、生きている微生物の化石と化石化された微生物の両方のさまざまな器具をテストすることで、LEMURのようなロボットは、これらの微生物がどのように生き、環境を形作り、死んだかについてさらに光を当てることができます。
課題の一部は、ツールをモバイルに対応できるほど小さくすることです。 そのため、Parnessと彼のチームは、ハードウェアのテストに加えて、大学パートナーと協力して、小型のリモートセンシングおよび分析機器を開発しています。 LEMURは、Ledurを腹やバックパックのように着用し、LIDARを使用して3Dで洞窟や地形をマッピングし、ガスクロマトグラフィーに、小さな近赤外分光計で有機物や炭素に富む分子を探すことができると考えています。
「[アーロン]パーネスのグループは、LEMURにパターン認識と機械学習を与えて、人間のように見えるようにする可能性を模索しています」とボストンは言いました。 「古生物学は非常に細かくて微妙な場合が多く、ロボットがテーブルにもたらす視覚および解釈機能の強化は、古生物学をよりよく理解するのに役立つ非常に強力なツールになる可能性があります。」
 南極山の頂上にあるJPLのポスドク研究者、アーロン・カーティス。 地球上で最南端の活火山であるエレバス。 (ディラン・テイラー)
南極山の頂上にあるJPLのポスドク研究者、アーロン・カーティス。 地球上で最南端の活火山であるエレバス。 (ディラン・テイラー) ホワイトハウスから提案された連邦予算の下で、小惑星リダイレクトミッション-LEMURが使用される可能性が最も高いプログラム-の資金は廃止されます。 ただし、Parnessと彼のチームは、LEMURでの作業を継続するように指示されています。 2017年の終わりに、パーネスはデスバレーのタイタスキャニオン地域に戻り、以前はLEMURをテストし、夏にはニューメキシコで溶岩洞に立ち寄りました。
そこでは、5億年前の化石化した藻類が、他の場所にある可能性のある古代遺跡の類似物として存在していますが、エンジニアはLEMURがそれらを見ることができるようにしなければなりません。 「火星や他の惑星の崖壁で生命を探しているのであれば、地球上で最も古い生命の痕跡を探し、そこで機器をテストする必要があります」とパーネスは言います。 「私たちが自分の惑星の生命を検出できない場合、より古い、より厳しいサンプルでそれを見つけることができるだろうという確信を私たちに与えるのはなぜですか?」