スクイーズロボットを想像してください。
関連性のあるコンテンツ
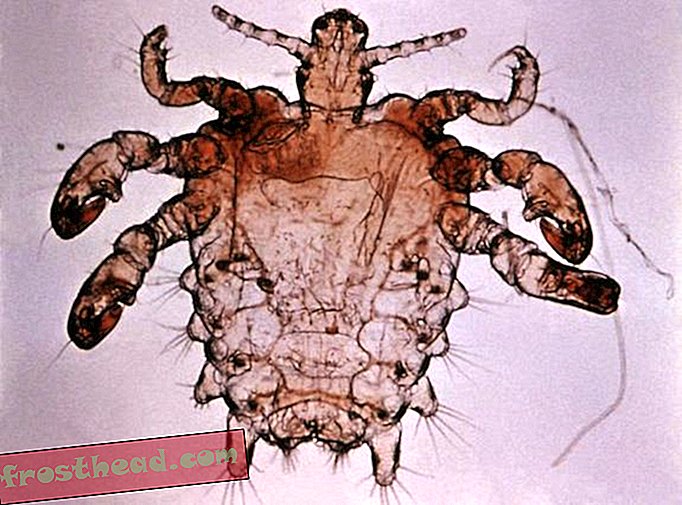
- ゴキブリを粉砕するのが難しい理由
簡単ではありませんか? ロボットは常に人体の最も硬い部分、つまり骨格を模倣するために主に構築された、ハードで機械的な金属製の道具でした。 そして、それらは柔軟性ではなく、精度に関するものであることになっています。
スクイーズ? ほとんどない。
例外として、先週のロボット工学の世界での2つの最大の話は、C-3POから非常に長い道のりを経た機械についてでした。 最初に発表されたのは、スイスのエコールポリテクニックフェデラルが非常に繊細なグリップを備えたロボットを開発したことです。非常に柔らかく、卵を拾うことができ、柔軟性があり、1枚の紙をつかむことができます。その重量を倍します。
秘密は、このマシンの2本の指のそれぞれがシリコンでできており、その中に2種類の異なる電極が埋め込まれていることです。1つは、形状に関係なく指を曲げてオブジェクトの周囲に合わせます。静電付着を使用してオブジェクトをつかみます。これは、最初に髪に毛を擦り付けて壁にバルーンを貼り付けるときと同じ原理です。
2番目のニュースメーカーは、あなたがRoboroachと呼ぶ賢い小さなデバイスでした。 これは、カリフォルニア大学バークレー校の科学者がゴキブリをモデルにした小さなロボットです。具体的には、体を平らにしてその通常の高さの4分の1にしかならない驚くべき能力です。
その教授陣は、研究者たちに、同じ方法で自分自身を圧縮できるロボットを設計するよう促しました。 それはまだ進行中の作業ですが、バークレーのチームは、センサーを備えたこの種の平坦化ロボットがいつか崩壊した建物の瓦の中をうごめくことができることを望んでいます。
未来の道
これらの革新は、単にソフトロボット工学として知られるロボット設計の新しいトレンドの一部です。 重要なのは、人間のような硬直した腕と脚に基づいた機械から離れて、代わりに「骨なし」と考えることです。
実際、ほとんどのソフトロボットのモデルは、昆虫、タコ、イカなどの無脊椎動物です。 シリコンやその他の曲げ可能な材料の進歩により、これらのロボットの1つは、例えば、広げたりねじったりした触手を使用して、さまざまな角度から何かをつかむことができます。 ソフトロボットは、ストレッチしたり、形状やサイズを変更したりできます。要するに、環境に適応できます。
これにより、ロボットの頭が反転します。 何十年もの間、ロボットは基本的に柔軟性がなく、何度も同じタスクを同じように実行するように綿密にプログラムされるように設計されてきました。 その一貫性が彼らの美しさでした。 それが、組立ラインやその他の容赦ない精度が重要な場所でそれらを非常に貴重なものにした理由です。
しかし、それらのロボットを設計された環境の外側に配置すると、それらはほとんど役に立たなくなります。 そして今、人工知能の進歩と並行して、ロボットはより複雑なタスクに取り組み、予測不可能なことに対処し、より多くの人間と対話することが期待されています。 実際、日本では、彼らは現在、国が急速に高齢化する人口に対処する方法の中心であると見なされています。彼らは高齢者の介護者です。
最初の大きなテスト
それでも、ソフトロボットは、そのすべての約束にもかかわらず、現実の世界ではほとんど実証されていません。 しかし、4月下旬には、10のチームがこれらの次世代マシンの最初の国際競争であるイタリアのRobosoft Grand Challengeでテストに参加します。
1つの課題は、災害サイトをシミュレートするように設計されます。これは、人間がナビゲートできないものです。 ロボットは、砂場を移動し、小さな穴をクロールし、階段を登り、不安定な場所でバランスを崩さずにバランスを取る必要があります。
もう1つは握り方です。 マシンは、オブジェクトを拾い上げて特定の場所に移動することで競合します。 また、従来のロボットでは非常に複雑な操作であるハンドルでドアを開くことができる必要があります。
最終テストは水中で行われます。 ロボットは水中に飛び込み、サイズを増減できる開口部を移動し、近くのサンゴ礁を破壊することなく藻類を除去できるかどうかを判断します。
やりがいがありますが、それはこの新しいロボットの波が必要とする単なる試練の場かもしれません。
以下は、最新のソフトロボットのいくつかの機能の例です。
デリケートなビジネス:最近、ロンドンの外科医は手術中に初めてソフトロボットを使用しました。 シリコン製で、タコの触手に似ており、あらゆる方向に曲げることができます。 これにより、カメラを備えたロボットは、狭い開口部や繊細な臓器を損傷することなく、それらを通り抜けることができました。
注意して扱う:従来のロボットは、海洋生物の繊細なサンプルを収集することに関しては不格好です。 しかし、ハーバード大学の工学と応用科学のチームは、水中でアイテムを優しく拾うことができる「スクイーズ」代替品、2種類のソフトグリッパーを発明しました。 ボアの収縮作用を模倣して、狭い空間に入り込んで不規則な形状の物体をつかむことができます。
ジャンピングキューブをたどる: MITのコンピューターサイエンスアンドアーティフィシャルインテリジェンスラボの研究者は、金属の「舌」を展開できるソフトな3インチキューブを作成しました。 科学者は、ジャンプキューブにカメラを取り付けて、いつか災害救助に使用できるようにしたいと考えています。
ジャンプしてください。